
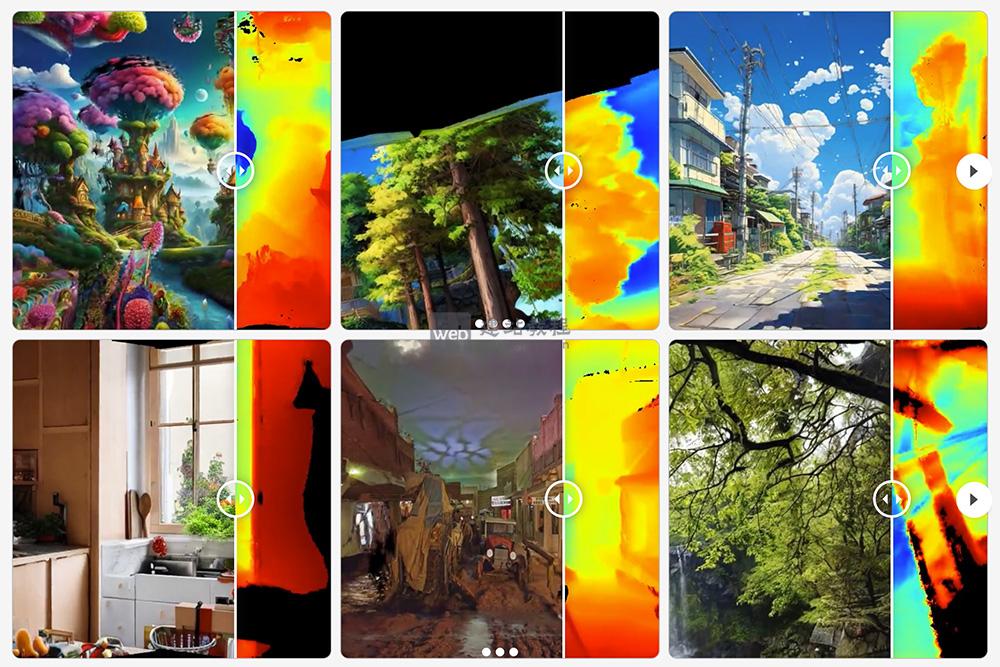
LucidDreamer——一款无域限制的3D场景生成管道,深度借助现有大规模扩散生成模型的强大能力,实现跨领域、高保真的3D场景创作。
LucidDreamer核心创新:
LucidDreamer 通过“做梦(Dreaming)”与“对齐(Alignment)”两大交替步骤,构建多视图一致、细节丰富的3D场景,具体流程如下:
1、做梦阶段:多视图一致图像生成:
以点云作为几何参考基准,保障多视图生成的一致性。具体而言,先将部分点云投影至目标视图,将该投影结果作为引导信号,驱动生成模型完成图像修复与生成;再通过估计的深度图,将生成的2D图像提升至3D空间,构建新的3D点集,为场景搭建奠定基础。
2、对齐阶段:3D场景和谐聚合:
为将新生成的3D点集无缝融入整体场景,团队创新提出对齐算法,可让3D场景各部分实现和谐集成。最终生成的3D场景将作为优化高斯飞溅(Gaussian Splatting)的初始点云——相较于传统3D场景生成方法,LucidDreamer 输出的高斯飞溅细节更丰富,且完全不受目标场景的领域限制。
LucidDreamer核心优势与控制能力:
1、无域限制,场景适配性广:
彻底打破传统模型的领域束缚,无论是室内空间、户外景观、工业场景还是奇幻场景,均可精准生成,适配VR内容创作、游戏开发、建筑设计等多元需求。
2、细粒度文本控制:
支持输入一系列文本提示词,实现对3D场景的精细化控制。用户可通过文字精准描述场景风格、物体布局、光影效果等细节,让生成结果精准匹配创作构想。
3、高保真高斯飞溅输出:
最终生成的高斯飞溅具备极高细节表现力,基于该初始点云优化后,可输出兼具真实感与细腻度的3D场景,远超传统方法的细节呈现能力。
LucidDreamer量化评估:
1、与扩散生成模型生成场景对比:
基于CLIP的Stable Diffusion生成图像,采用CLIP-Score、CLIP-IQA(含质量、色彩鲜艳度、清晰度三大标准)及RGBD2指标进行定量评估,结果显示 LucidDreamer 在所有指标上均呈现主导性优势。
2、重建性能评估:
以初始SfM点的来源为变量,采用COLMAP工具对比高斯飞溅的重建结果。实验表明,使用LucidDreamer生成的点云进行重建时,各项重建指标均持续优于对比方案,验证了其3D几何结构的可靠性。
daVinci-MagiHuman音视频生成模型 - 模型采用150亿参数的单流Transformer架构
Steerling-8B模型使用入口,80亿参数规模,在1.35万亿Token语料上训练完成
ComfyUI-LaoLi-Shadow安装插件入口,面向ComfyUI的底层性能加速插件
ComfyUI-RMBG v3.0.0插件使用入口,专业级图像分割与背景移除扩展
Minimalistic Comfy Wrapper WebUI模型GitHub使用入口
上面是“LucidDreamer:无域限制3D场景生成管道,解锁真实世界级场景创作”的全面内容,想了解更多关于 AI项目和框架 内容,请继续关注web建站教程。
当前网址:https://m.ipkd.cn/webs_27454.html
声明:本站提供的所有资源部分来自互联网,如果有侵犯您的版权或其他权益,请发送到邮箱:admin@ipkd.cn,我们会在看到邮件的第一时间内为您处理!

 233动漫官网:提供日漫、国漫、美漫等海量的动漫资源
233动漫官网:提供日漫、国漫、美漫等海量的动漫资源 Dola AI日历
Dola AI日历 夸克文档:提供房屋租赁合同/入党申请书/工作证明/离职证明等模板
夸克文档:提供房屋租赁合同/入党申请书/工作证明/离职证明等模板 迅雷下载支持
迅雷下载支持 一个快速构建Web应用的低代码AI平台——Debuild
一个快速构建Web应用的低代码AI平台——Debuild 独响APP最新版
独响APP最新版