
MindVLA-o1是理想汽车推出的下一代自动驾驶基础模型,采用原生多模态MoE架构,将视觉、语言、行为三种模态深度统一融合。模型通过3D ViT编码器实现精准空间理解,借助隐式世界模型完成未来场景推演,以统一行为生成机制输出驾驶轨迹;结合闭环强化学习与软硬件协同设计,实现“看得更远、想得更深、行得更稳”,成为自动驾驶向通用具身智能体演进的关键里程碑。
MindVLA-o1核心功能:
1、3D空间感知:
通过3D ViT编码器与前馈式3DGS表示,精准建模静态环境与动态物体,实现全方位三维空间感知,打破传统感知局限。
2、多模态思考推理:
引入预测式隐世界模型,在隐空间中高效推演未来场景演化,实现视觉理解与语言推理的深度融合,提升决策前瞻性。
3、统一行为生成:
依托VLA-MoE架构与并行解码机制,生成符合动力学约束的高精度驾驶轨迹,兼顾实时性与准确性,适配复杂驾驶场景。
4、闭环自我进化:
基于Feed-forward场景重建与强化学习框架,在仿真环境中持续自我迭代,突破真实数据规模限制,不断提升模型性能。
5、高效端侧部署:
通过软硬件协同设计优化,在车载端侧芯片上实现高效部署,完美平衡模型精度与推理效率,适配车载实际应用场景。
MindVLA-o1技术原理:
1、3D自监督视觉编码:
以视觉为核心,3D ViT编码器将LiDAR点云作为几何提示,结合前馈式3DGS表示分别建模静态与动态元素,通过下一帧预测任务完成自监督训练,同时具备语义理解与三维感知能力。
2、预测式隐世界模型:
规避直接生成未来图像的高计算成本,在紧凑隐空间中构建未来场景表征与推演能力,实现“理解当前、想象未来、逻辑判断”的一体化,提升决策效率。
3、统一行为生成:
VLA-MoE架构中的Action Expert专门负责驾驶轨迹生成,采用并行解码一次性输出所有轨迹点以满足实时性,通过离散扩散多轮迭代优化,确保轨迹连续且符合动力学约束。
4、闭环强化学习:
将传统逐步优化式重建升级为Feed-forward场景重建,结合生成式模型扩展仿真能力,依托统一3DGS渲染引擎与分布式训练框架,实现低成本、高效率的强化学习闭环。
5、软硬件协同设计:
基于Roofline模型刻画硬件约束,评估近2000种架构配置,找到精度与延迟的Pareto最优解;发现端侧场景下“更宽更浅”的模型架构更高效,将架构探索周期从数月缩短至数天。
MindVLA-o1应用场景:
1、自动驾驶:
作为下一代自动驾驶基础模型,覆盖城市道路、高速公路、复杂路口等全场景,实现从感知理解到决策规划的全链路智能化,保障驾驶安全与流畅。
2、智能座舱交互:
依托原生多模态架构的语言理解能力,精准解读乘客语音指令,结合视觉感知实现人机自然交互,提供主动式智能服务。
3、机器人控制:
同一套VLA模型可扩展至机器人平台,驱动机械臂、轮式机器人等各类具身智能体,完成物理世界中的各类任务,实现跨场景复用。
4、仿真测试验证:
通过MindSim世界模型生成高保真虚拟场景,支持极端天气、罕见事故等长尾场景的大规模闭环测试,助力模型快速迭代优化。
5、智能交通管理:
依托3D空间理解与未来预测能力,扩展应用于车路协同、交通流量预测等领域,助力构建城市级智慧交通系统。
LFM2-24B-A2B模型使用入口,LiquidAI正式发布的LFM2家族模型
Grok 4.20模型使用入口,采用约3T参数的MoE架构,支持256K tokens超长上下文窗口
JoyAI-LLM-Flash模型官网入口,京东开源的中型指令大模型
JoyAI-LLM-Flash模型使用入口,京东AI开源的最新大语言模型
Ovis2.6-30B-A3B模型使用入口,阿里国际Ovis系列多模态大语言模型
上面是“MindVLA-o1模型使用入口,理想汽车推出的下一代自动驾驶基础模型”的全面内容,想了解更多关于 AI项目和框架 内容,请继续关注web建站教程。
当前网址:https://m.ipkd.cn/webs_31895.html
声明:本站提供的所有资源部分来自互联网,如果有侵犯您的版权或其他权益,请发送到邮箱:admin@ipkd.cn,我们会在看到邮件的第一时间内为您处理!

 Excel函数实现网页数据抓取代码示例
Excel函数实现网页数据抓取代码示例 DiaMoE-TTS:清华 × 巨人网络联合开源的多方言TTS框架
DiaMoE-TTS:清华 × 巨人网络联合开源的多方言TTS框架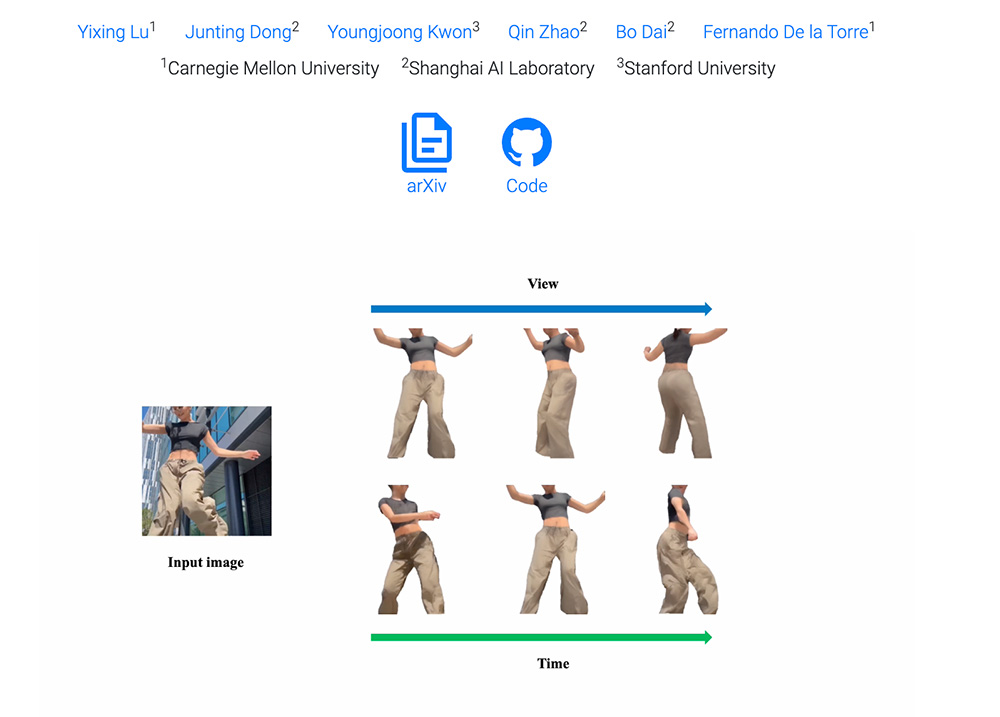 GAS:一种基于高斯渲染的3D人体生成框架
GAS:一种基于高斯渲染的3D人体生成框架